
1. Concurrent access to shared data
- Example
- suppose that two processes A and B have access to a shared variable “Balance”
- process A: Balance = Balance – 100
- process B: Balance = Balance – 200
- Further, assume that Process A and Process B are executing concurrently in a time-shared, multiprogrammed system
- The statement “balance = balance – 100” is implemented by several machine level instructions such as
- A1. LOAD R1, BALANCE //load BALANCE from memory to register 1 (R1)
- A2. SUB R1, 100 //subtract 100 from R1
- A2. STORE BALANCE, R1 //store R1’s contents back to the memory location of BALANCE
- Similarly, “BALANCE = BALANCE – 200” can be implemented in the following
- B1. LOAD R1, BALANCE
- B2. SUB R1, 200
- B3. STORE BALANCE, R1
2. Race Condition
- Observe: in a time-shared system, the exact instruction execution order cannot be predicted
- Situations like this, where multiple processes are writing or reading some shared data and the final result depends on who runs precisely when, are called race conditions.
- A serious problem for any concurrent system using shared variables.
- We must make sure that some high-level code sections are executed atomically.
- Atomic operation means that it completes in its entirety without worrying about interruption by an other potentially conflict-causing process.
3. The Critical-Section Problem
- n processes are competing to use some shared data
- Each process has a code segment, called critical section (critical region), in which the shared data is accessed.
- Problem: ensure that when one process is executing in its critical section, no other process is allowed to execute in that critical section.
- The execution of the critical sections by the processes must be mutually exclusive in time
4. Solving Critical-Section Problem
Any solution to the problem must satisfy four conditions
- Mutual Exclusion
- no two processes may be simultaneously inside the same critical section
- Bounded Waiting
- no process should have to wait forever to enter a critical section
- Progress
- no process executing a code segment unrelated to a given critical section can block another process trying to enter the same crtical section
- Arbitrary speed
- no assumption can be made about the relative speed of different processes (though all processes have a non-zero speed)
5. General Structure of a Typical Process
do{
…
entry section
critical section
exit section
remainder section
} while(1);
- we assume this structure when evaluating possible solutions to Critical Section Problem
- in the entry section, the process requests “permission”
- we consider single-processor systems
5. Getting help from hardware
- one solution supported by hardware may be to use interrupt capability
do{
DISABLE INTERRUPTS
critical section;
ENABLE INTERRUPTS
remainder section
} while(1);
6. Synchronization Hardware
- Many machines provide special hardware instructions that help to achieve mutual exclusion
- The TestAndSet (TAS) instruction tests and modifies the content of a memory word automatically
- TAS R1, LOCK
- reads the contents of the memory workd LOCK into register R!
- and stores a nonzero value (e.g. 1) at the memory word LOCK (again, automatically)
- assume LOCK = 0;
- calling TAS R1, LOCK will set R! to 0, and set LOCK to 1
- Assume lOCK = 1
- calling TAS R1 LOCK will set R1 to 1, and set LOCK to 1
7. Mutual Exclusion with Test-and-Set
- Initially, share memory word LOCK = 0;
- Process pi
do{
entry-section:
TAS R1, LOCK
CMP R1, #0
JNE entry_section //if not equal, jump to entry
critical section
MOVE LOCK, #0 //exit section
remainder section
} while(1);
8. Busy waiting and spin locks
- This approach is based on busy waiting: if the critical section is being used, waiting processes loop continuously at the entry point
- a binary lock variable that uses busy waiting is called “spin lock”
9. Semaphores
- Introduced by E.W. Dijkstra
- Motivation: avoid busy waiting by locking a process execution until some condition is satisfied
- Two operations are defined on a semaphore variable s
- wait(s): also called P(s) or down(s)
- signal(s): also called V(s) or up(s)
- We will assume that these are the only user-visible operations on a semaphore
10. Semaphore Operations
- Concurrently a semaphore has an integer value. This value is greater than or equal to 0
- wait(s)
- wait/block until s.value > 0 //executed atomatically
- a process executing the wait operation on a semaphore, with value 0 is blocked until the semaphore’s value become greater than 0
- no busy waiting
- signal(s)
- s.value++ //execute automatically
- If multiple processes are blocked on the same semaphore “s”, only one of them will be awakened when another process performs signal(s) operation
- Semaphore as a general synchronization tool: semaphores provide a general process synchronization mechanism beyond the “critical section” problem
11. Deadlocks and Starvation
- A set of processes are aid to be in a deadlock state when every process in the set is waiting for an even that can be caused by another process in the set
- A process that is forced to wait indefinitely in a synchronization program is said to be subject to starvation
- in some execution scenarios, that process does not make any progress
- deadlocks imply starvation, bu the reverse is not true
12. Classical problem of synchornization
- Produce-Consumer Program
- Readers-Writer Problem
- Dining-Philosophers Problem
- The solution will use only semaphores as synchronization tools and busy waiting is to be avoided.
13. Producer-Consumer Problem
- Problem
- The bounded-buffer producer-consumer problem assumes there is a buffer of size n
- The producer process puts items to the buffer area
- The consumer process consumes items from the buffer
- The producer and the consumer execute concurrently
- Make sure that
- the producer and the consumer do not access the buffer area and related variables at the same time
- no item is made available to the consumer if all the buffer slots are empty
- no slots in the buffer is made available to the producer if all the buffer slots are full
- Shared data
- semaphore full, empty, mutex
- Initially
- full = 0; //the number of full buffers
- empty = n; //the number of empty buffers
- mutex = 1; // semaphore controlling the access to the buffer pool
- Producer Process
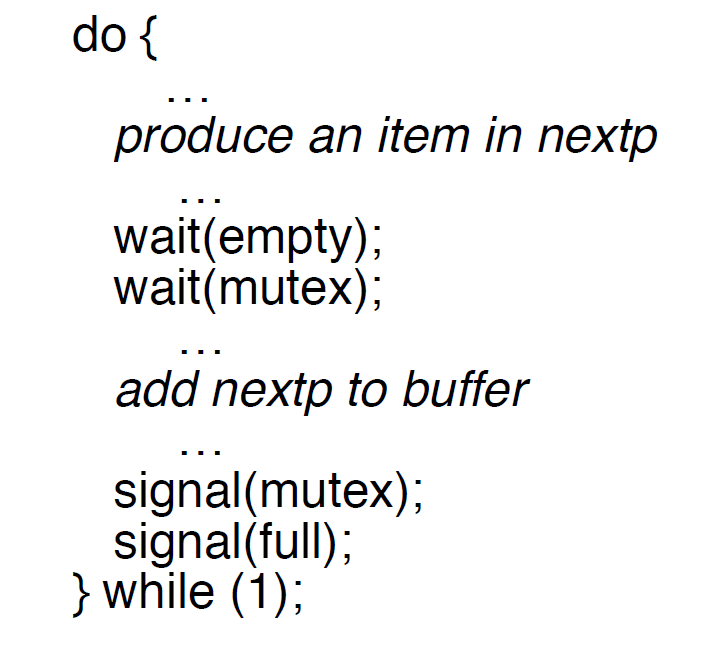
- Consumer Process

14. Readers-Writers Problem
- Problem
- A data object( e.g. a file) is to be shared among several concurrent processes
- A write process must have exclusive access to the data object
- Multiple reader processes may access the shared data simultaneously without a problem
- Shared data
- semaphore mutex, wrt
- int readaccount
- Initially
- mutex = 1
- readcount = 0, wrt= 1
- Writer Process

- Read Process

15. Dining-Philosophers Problem
- Problem
- five phisolophers share a common circular table
- there are five chopsticks and a bowl of rice (in the middle)
- when a philosopher gets hungry, he tries to pick up the closest chopsticks
- a philosopher may pick up only one chopstick at a time, and he cannot pick up one that is already in use.
- when done, he puts down both of his chopsticks, one after the other.
- Shared Data
- semaphore chopsticks [5]
- Initially
- all semaphore values are 1
